ਫੇਡੋਜ਼ਿਅਨਜ਼ ਨੇਵੀਗੇਟ ਕਰਨ ਲਈ ਫੇਫੜਿਆਂ ਵਿਚੋਂ ਇਕ ਸਭ ਤੋਂ ਮੁਸ਼ਕਲ ਅੰਗ ਹੁੰਦੇ ਹਨ. ਉਨ੍ਹਾਂ ਕੋਲ ਖੂਨ ਦੀਆਂ ਨਾੜੀਆਂ, ਬ੍ਰੌਨਚੀ, ਅਤੇ ਹੋਰ ਨਾਜ਼ੁਕ ਸਰੀਰ ਵਿਗਿਆਨਕ structures ਾਂਚਿਆਂ ਦਾ ਸੰਘਣਾ ਨੈਟਵਰਕ ਹੈ ਜੋ ਦੂਰ ਦੇ ਫੇਫੜੇ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਦੇ ਹਨ ਨੋਡਿ .ਲ ਇੱਕ ਰਵਾਇਤੀ ਦੇ ਨਾਲ ਬ੍ਰੌਨਕੋਸਕੋਪ ਚੁਣੌਤੀਪੂਰਨ.
ਇਨ੍ਹਾਂ ਕਮੀਆਂ ਨੂੰ ਦੂਰ ਕਰਨ ਲਈ, ਚੈਪਲ ਹਿੱਲ, ਵੈਂਡਰਬਿਲਟ ਯੂਨੀਵਰਸਿਟੀ ਵਿਖੇ ਉੱਤਰੀ ਕੈਰੋਲਿਨਾ ਯੂਨੀਵਰਸਿਟੀ ਵਿਚ ਖੋਜਕਰਤਾਵਾਂ ਨੇ, ਅਤੇ ਯੂਟਾ ਦੇ ਇਕ ਸੰਖੇਪ ਚੀਜ਼ ਬਣੀ ਹੈ ਜੋ ਕਿ ਜੀਵਤ ਜਾਨਵਰਾਂ ਦੇ ਫੇਫੜਿਆਂ ਦੇ ਦੁਆਲੇ ਇਕ ਲਚਕਦਾਰ ਸੂਈ ਨੂੰ ਚਲਾ ਸਕਦੀ ਹੈ.
ਮੋਰੀਆ ਬਿੱਟੈਂਗਜ਼ ਨੇ ਕਿਹਾ, “ਰੋਬੋਟਿਕ ਸਿਸਟਮ ਇਸ ਵਿੱਚ ਨਵੀਨਤਾਕਾਰੀ ਹੈ ਜੋ ਕਿ ਇਸ ਵਿੱਚ ਆਕਿਸ਼ੇਡ ਸੂਝ ਨੂੰ ਘਟਾਉਣ ਦੇ ਨਿਰਦੇਸ਼ਕ ਨੂੰ ਸਮਰੱਥ ਕਰ ਸਕਦਾ ਹੈ.
ਵਿਗਿਆਨੀਆਂ ਨੇ ਉਨ੍ਹਾਂ ਵਿੱਚ ਦਿਖਾਇਆ ਪ੍ਰੀਕਲਿਨਿਕਲ ਅਧਿਐਨ ਵਿੱਚ ਪ੍ਰਕਾਸ਼ਤ ਵਿਗਿਆਨ ਰੋਬੋਟਿਕਸ ਕਿ ਰੋਬੋਟ ਨਾਲ ਚੱਲਣ ਵਾਲੇ ਬ੍ਰੌਨਕੋਸਕੋਪੀ ਸੂਈ ਨੂੰ ਚੁਣੇ ਟੀਚਿਆਂ ਤੇ ਪਹੁੰਚਣ ਵਿਚ ਇਕ ਡਾਕਟਰ ਤੋਂ ਸੇਧਿਆ ਬ੍ਰੌਨਕੋਸਕੋਪੀ ਸੂਈ ਨੂੰ ਪਛਾੜ ਦਿੱਤਾ. ਟੀਚੇ ਦੀਆਂ ਗਲਤੀਆਂ ਇੰਨੀਆਂ ਛੋਟੀਆਂ ਸਨ ਕਿ ਰੋਬੋਟ ਨੂੰ ਛੋਟੇ ਕਲੀਨਿਕਲੀ relevant ੁਕਵੇਂ reled ੁਕਵੇਂ ਨੋਫੋਡਜ਼ ਨੂੰ ਬਾਇਓਪੌਡ ਕਰਨ ਲਈ ਵਰਤਿਆ ਜਾ ਸਕਦਾ ਹੈ.
ਉਨ੍ਹਾਂ ਨੇ ਆਪਣੇ ਅਧਿਐਨ ਲਈ ਸੂਰ ਦੇ ਫੇਫੜਿਆਂ ਦੀ ਚੋਣ ਮਨੁੱਖੀ ਫੇਫੜਿਆਂ ਨੂੰ ਕੀਤੀ.
“ਇਹ ਸਭ ਤੋਂ ਵੱਡਾ ਮੀਲ ਪੱਥਰ ਹੈ ਜੋ ਅਸੀਂ ਹੁਣ ਤੱਕ ਪਹੁੰਚਿਆ ਸੀ. ਇਹ ਰੋਬੋਟ ਹੈ, ਜੋ ਕਿ ਖੁਦਮੁਖਤਿਆਰੀ ਦੇ ਪ੍ਰਿੰਸੀਪਲਿਨਾ ਅਤੇ ਅਧਿਐਨ ਦੇ ਪ੍ਰਿੰਸੀਪਲ ਇਨਵੈਸਟਿਨਾ ਦੇ ਪ੍ਰੈਸਰਿਨਾ ਦੀ ਪ੍ਰੈਸਰ ਹੈ, ਅਤੇ ਪ੍ਰਿੰਸੀਪਲ ਇਨਵੈਸਟਿਨਾ ਦੇ ਪ੍ਰੈਸਰਿਨਾ ਦੇ ਪ੍ਰੈਸਰਿਨਾ ਦੇ ਪ੍ਰੋਫੈਸਰ, ਚੈਪਲ ਹਿੱਲ ਵਿਖੇ ਪ੍ਰੈਸਰਿਨਾ ਦੇ ਪ੍ਰੋਫੈਸਰ ਹਨ.
ਰੋਬੋਟ ਨੂੰ ਡਿਜ਼ਾਈਨ ਕਰਨਾ
ਫੇਫੜਿਆਂ ਦੇ ਨਿੰਦਿਆ ਨਿਦਾਨ ਕਰਨ ਦਾ ਸਭ ਤੋਂ ਘੱਟ ਹਮਲਾਵਰ way ੰਗ ਹੈ ਬ੍ਰੌਨਕੋਸਕੋਪੀ, ਇਕ ਵਿਧੀ ਜਿਸ ਨਾਲ ਇਕ ਡਾਕਟਰ ਮਰੀਜ਼ ਦੇ ਮੂੰਹ ਅਤੇ ਏਅਰਵੇਜ਼ ਦੁਆਰਾ ਇਕ ਐਂਡੋਸਕੋਪ ਦਾ ਜਵਾਬ ਦਿੰਦਾ ਹੈ. ਉਥੋਂ, ਇਕ ਸਿੱਧੀ ਸੂਈ ਨੂੰ ਇਕ ਟਾਰਗੰਗ ਸਾਈਟ ਤੇ ਫੇਫੜਿਆਂ ਦੇ ਟਿਸ਼ੂ ਵਿਚ ਪਾਇਆ ਜਾਂਦਾ ਹੈ, ਜੋ ਕਿ ਵਿਸ਼ਲੇਸ਼ਣ ਲਈ ਛੁਪਿਆ ਹੋਇਆ ਇਕ ਛੋਟਾ ਜਿਹਾ ਨਮੂਨਾ ਹਟਾਉਂਦਾ ਹੈ.
ਹਾਲਾਂਕਿ, ਮੌਜੂਦਾ ਮੈਨੂਅਲ ਬ੍ਰੌਨਕੋਸਕੋਪੀ ਦੀਆਂ ਤਕਨੀਕਾਂ ਦੀਆਂ ਕਈ ਸੀਮਾਵਾਂ ਹੁੰਦੀਆਂ ਹਨ. ਸਿੱਧੀ ਸੂਈਆਂ ਸਰੀਰ ਵਿਗਿਆਨਕ ਰੁਕਾਵਟਾਂ ਅਤੇ ਫੇਫੜਿਆਂ ਦੇ ਟਿਸ਼ੂ ਦੇ ਦੁਆਲੇ ਨੈਵੀਗੇਟ ਕਰਨ ਲਈ ਤਿਆਰ ਨਹੀਂ ਕੀਤੀਆਂ ਗਈਆਂ ਹਨ ਜਦੋਂ ਲੋਕ ਸਾਹ ਲੈਂਦੇ ਹਨ. ਇਨ੍ਹਾਂ ਰੁਕਾਵਟਾਂ ਕੋਲ ਫੇਫੜਿਆਂ ਦੇ ਅੰਦਰ ਅਤੇ ਹੋਰ ਹਵਾ ਦੇ ਅੰਦਰ ਛੋਟੇ ਨੋਡਿ ule ਲ ਜਾਂ ਨੋਡੂਲਜ਼ ਦੇ ਬਾਇਓਪਸੀਜ਼ ਜਾਂ ਇਸ ਤੋਂ ਇਲਾਵਾ ਹੋਰ ਦੂਰ
“We are trying to target an object the size of a pea that’s moving when the person breathes so it’s like trying to hit a moving target that’s very small,” said Jason Akulian, MD, study co-author and a pulmonary interventionist at the University of North Carolina at Chapel Hill.
ਰੋਬੋਟ-ਸਹਾਇਤਾ ਵਾਲੇ ਬ੍ਰੌਨਕੋਸਕੋਪੀ ਨੇ ਦੂਰ-ਦੁਰਾਡੇ ਤੱਕ ਪਹੁੰਚਣ ਵਿੱਚ ਵਾਧਾ ਕੀਤਾ ਹੈ, ਅਜੇ ਵੀ ਇੱਕ ਡਾਕਟਰ ਅਜੇ ਵੀ ਬ੍ਰੌਨਕੋਸਕੋਪ ਨੂੰ ਚਲਾਉਣਾ ਚਾਹੀਦਾ ਹੈ, ਅਤੇ ਮੌਜੂਦਾ ਸਿਸਟਮ ਸੂਈਆਂ ਦੀ ਪੇਸ਼ਕਸ਼ ਨਹੀਂ ਕਰਦੇ ਜੋ ਫੇਫੜਿਆਂ ਦੇ ਟਿਸ਼ੂ ਦੁਆਰਾ ਚਲ ਸਕਦੇ ਹਨ.
ਖੋਜਕਰਤਾਵਾਂ ਨੇ ਇਹਨਾਂ ਸੀਮਾਵਾਂ ਨੂੰ ਸੰਬੋਧਿਤ ਕੀਤਾ ਜਦੋਂ ਉਨ੍ਹਾਂ ਨੇ ਆਪਣੇ ਅਰਧ-ਖੁਦਮੁਖਤਿਆਰੀ ਰੋਬੋਟਿਕ ਪ੍ਰਣਾਲੀ ਨੂੰ ਡਿਜ਼ਾਈਨ ਕੀਤਾ. ਸਿਸਟਮ ਦੇ ਤਿੰਨ ਪੜਾਅ ਹਨ: ਪਹਿਲੇ ਦੋ ਨੂੰ ਟ੍ਰੇਨਕੋਸਕੋਪ ਪਾਉਣ ਦੀ ਜ਼ਰੂਰਤ ਹੁੰਦੀ ਹੈ ਅਤੇ ਸਾੱਫਟਵੇਅਰ ਨਾਲ ਜੋੜਨ ਵਾਲੇ ਉਪਕਰਣ ਨੂੰ ਚਲਾਓ (ਸਾੱਫਟਵੇਅਰ ਦੇ ਨਾਲ ਜੋੜ ਕੇ) ਨੂੰ ਫੇਫੜਿਆਂ ਦੇ ਇੱਕ ਲੋੜੀਂਦੇ ਨਿਸ਼ਾਨੇ ਤੇ ਚਲਾਓ; ਆਖਰੀ ਪੜਾਅ ਇਹ ਹੈ ਕਿ ਰੋਬੋਟ ਆਟੋਮੈਟਿਕ ਤੌਰ ‘ਤੇ ਸੂਈ ਨੂੰ ਇਸ ਦੀ ਮੰਜ਼ਿਲ ਲਈ ਵਧਾਉਂਦਾ ਹੈ.
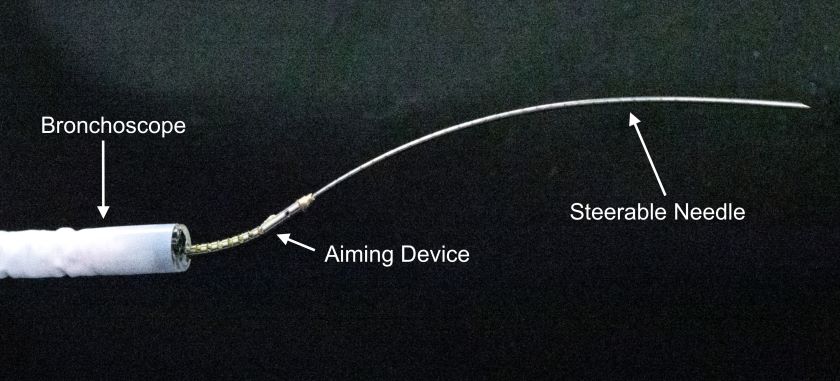
ਸਿਸਟਮ ਦੇ ਹਾਰਡਵੇਅਰ ਦੇ ਸਭਾ ਦੇ ਭਾਗਾਂ ਵਿੱਚ ਲਚਕਦਾਰ ਲੇਜ਼ਰ-ਪੈਟਰਨ ਦੀਆਂ ਸੂਈਆਂ ਸ਼ਾਮਲ ਹਨ ਜੋ ਕਿ ਐਨੀਟੋਮਿਕਲੀਆਂ ਰੁਕਾਵਟਾਂ ਦੇ ਦੁਆਲੇ, ਸੂਈ ਨੂੰ ਦਬਾਦੀਆਂ ਅਤੇ ਇੱਕ ਉਦੇਸ਼ ਉਪਕਰਣ ਦੇ ਮਕੈਨੀਕਲ ਨਿਯੰਤਰਣ.
ਸਿਸਟਮ ਦਾ ਸਾੱਫਟਵੇਅਰ ਸੁਤੰਤਰ ਤੌਰ ‘ਤੇ ਸੂਈ ਦੇ ਸਟੀਰਿੰਗ ਨੂੰ ਤਿਆਰ ਕਰਦਾ ਹੈ ਅਤੇ ਸੀਆਈਐਮਆਈਟੀਜ਼ ਉਪਕਰਣ ਨੂੰ ਸੰਚਾਲਿਤ ਕਰਦਾ ਹੈ. ਪਿਛਲੇ ਕੰਪਿ uted ਟਡ ਟੋਮੋਗ੍ਰਾਫੀ (ਸੀਟੀ) ਸਕੈਨ ਤੋਂ ਹਾਸਲ ਕੀਤੇ ਸੂਰ ਦੇ ਸੂਰਾਂ ਦੇ ਫੇਫੜਿਆਂ ਦਾ 3 ਡੀ ਨਕਸ਼ਾ ਵਰਤਣਾ, ਜਾਨਵਰਾਂ ਦੇ ਸਾਹ ਕਾਰਨ ਖੂਨ ਦੀਆਂ ਮਸਤਾਂ ਅਤੇ ਖਾਤਿਆਂ ਨੂੰ ਸਾਹਿਤਕ ਅਤੇ ਖਾਤਿਆਂ ਦੇ ਖਾਤਿਆਂ ਤੋਂ ਪਰਹੇਜ਼ ਕਰਦਾ ਹੈ.
ਰੋਬੋਟ ਦੇ ਪ੍ਰਦਰਸ਼ਨ ਦੀ ਜਾਂਚ ਕਰ ਰਿਹਾ ਹੈ
ਖੋਜਕਰਤਾ ਇਹ ਦੱਸਣਾ ਚਾਹੁੰਦੇ ਸਨ ਕਿ ਖੁਦਮੁਖਤਿਆਰੀ ਪ੍ਰਣਾਲੀ ਨੇ ਸੂਈ ਨੂੰ ਰਹਿਣ, ਸਾਹ ਲੈਣ ਵਾਲੇ ਫੇਫੜਿਆਂ ਦੇ ਟਿਸ਼ੂ ਜਾਂ ਫੈਂਟਮ ਫੇਫੜਿਆਂ ਦੇ ਟਿਸ਼ੂ ਨਾਲੋਂ ਨੈਵੀਗੇਟ ਕਰਨਾ ਵਧੇਰੇ ਚੁਣੌਤੀਪੂਰਨ ਲਗਾਇਆ.
ਪ੍ਰਯੋਗਾਂ ਦਾ ਪਹਿਲਾ ਸਮੂਹ ਦਾ ਮੁਲਾਂਕਣ ਕੀਤਾ ਕਿ ਕੀ ਰੋਬੋਟ ਨਾਲ-ਪੱਖੀ ਸੂਈ ਨੇ ਜੀਵਤ ਸੂਰ ਫੇਫੜੇ ਦੇ ਟਿਸ਼ੂ ਵਿੱਚ ਯੋਜਨਾਬੱਧ ਰਸਤੇ ਦੀ ਸਹੀ ਪਾਲਣਾ ਕੀਤੀ. ਤਿੰਨ ਸੂਈ ਤੈਨਾਤ ਦੇ ਨਤੀਜੇ ਨੇ ਸਿਰਫ ਛੋਟੇ ਭਟਕਣਾ ਦੇ ਨਾਲ ਸਵੈਚਾਲਤ ਸਟੀਰਿੰਗ ਨੂੰ ਦਿਖਾਇਆ.
ਗਰਭਪਾਤ ਦੀ ਸੂਈ ਸੁਰੱਖਿਅਤ ly ੰਗ ਨਾਲ ਐਨੀਟੋਮਿਕਲੀਆਂ ਰੁਕਾਵਟਾਂ ਤੋਂ ਪਰਹੇਜ਼ ਕਰਦੀ ਹੈ ਅਤੇ 2.7 ਮਿਲੀਮੀਟਰ ਦੀ arverp ਸਤਨ ਅਸ਼ੁੱਧੀ ਵਾਲੇ ਟੀਚਿਆਂ ਤੇ ਪਹੁੰਚ ਜਾਂਦੀ ਹੈ. ਸਭ ਤੋਂ ਛੋਟੇ ਖੂਨ ਦੇ ਡਾਕਟਰ ਬਾਇਓਪਸੀ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਨਗੇ ਜੋ ਵਿਆਸ ਵਿੱਚ ਲਗਭਗ 8 ਮਿਲੀਮੀਟਰ ਹਨ, ਇਸ ਲਈ ਕੋਈ ਅਸਲ ਬਾਇਓਪਸੀ ਦੇ ਟੀਚੇ ਦੀ ਸ਼੍ਰੇਣੀ ਵਿੱਚ ਚੰਗੀ ਤਰ੍ਹਾਂ ਡਿਗਿਆ.
ਪ੍ਰਯੋਗਾਂ ਦਾ ਦੂਜਾ ਸਮੂਹ ਮੈਨੂਅਲ ਡਾਇਗਨੌਸਟਿਕ ਬ੍ਰੌਨਕੋਸਕੋਪੀ ਤਕਨੀਕ ਦੇ ਨਾਲ ਰੋਬੋਟ-ਸਟੀਅਰ ਬ੍ਰੌਨਕੋਸਕੋਪੀ ਸੂਈ ਦੀ ਤੁਲਨਾ ਵਿੱਚ ਪ੍ਰਯੋਗਾਂ ਦਾ ਦੂਜਾ ਸੈੱਟ. ਕੁੱਲ ਸੂਈ ਤੈਨਾਮ ਦੇ ਨਤੀਜਿਆਂ ਨੇ ਦਿਖਾਇਆ ਕਿ average ਸਤਨ, ਰੋਬੋਟ ਨਾਲ-ਪੱਖੀ ਸੂਈ ਨੂੰ ਮੈਨੂਅਲ ਟੂਲ (ਲਗਭਗ 13 ਮਿਲੀਮੀਟਰ) ਨਾਲੋਂ ਘੱਟ ਨਿਸ਼ਾਨਾ ਬਣਾਉਣ ਵਾਲੀ ਗਲਤੀ (ਲਗਭਗ 3.5 ਮਿਲੀਮੀਟਰ) ਤੋਂ ਘੱਟ ਟਾਰਗੇਟਿੰਗ ਗਲਤੀ (ਲਗਭਗ 13 ਮਿਲੀਮੀਟਰ) ਤੋਂ ਘੱਟ ਟਾਰਗੇਟਿੰਗ ਗਲਤੀ (ਲਗਭਗ 3.5 ਮਿਲੀਮੀਟਰ) ਤੋਂ ਘੱਟ ਟਾਰਗੇਟਿੰਗ ਗਲਤੀ (ਲਗਭਗ 3.5 ਮਿਲੀਮੀਟਰ) ਨਾਲੋਂ ਘੱਟ ਨਿਸ਼ਾਨਾ ਬਣਾਉਂਦੀ ਹੈ.
ਅਪਰੋਵਿਟਜ਼ ਨੇ ਕਿਹਾ, “ਨਤੀਜੇ ਮੈਡੀਕਲ ਰੋਬੋਟਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ ਡਾਕਟਰੀ ਪ੍ਰਕਿਰਿਆਵਾਂ ਦੀ ਸ਼ੁੱਧਤਾ ਨੂੰ ਬਿਹਤਰ ਬਣਾਉਣ ਦੀ ਸੰਭਾਵਨਾ ਨੂੰ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਦੇ ਹਨ.
ਖੋਜਕਰਤਾ ਮਨੁੱਖੀ ਕਵਰਡ ਫੇਫੜਿਆਂ ਵਿੱਚ ਅਗਾਂਹਵਧੂਂ ਉਨ੍ਹਾਂ ਦੇ ਰੋਬੋਟ ਨੂੰ ਪਰਖਣ ਦੀ ਯੋਜਨਾ ਬਣਾਉਂਦੇ ਹਨ, ਇਸਦੇ ਬਾਅਦ ਜੀਵਿਤ ਮਨੁੱਖੀ ਅਜ਼ਮਾਇਸ਼ਾਂ ਹਨ. ਉਹ ਨਿਸ਼ਾਨਾ ਉਪਕਰਣ ਦੇ ਸੰਚਾਲਨ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਸਵੈਚਾਲਤ ਕਰਨ ਦੀ ਯੋਜਨਾ ਵੀ ਕਰਦੇ ਹਨ.
ਖੋਜਕਰਤਾਵਾਂ ਦਾ ਅਖੀਰਲੇ ਉਦੇਸ਼ ਮਰੀਜ਼ਾਂ ਦੀ ਦੇਖਭਾਲ ਨੂੰ ਬਿਹਤਰ ਬਣਾਉਣ ਲਈ ਨਵੀਂ ਟੈਕਨੋਲੋਜੀ ਦਾ ਲਾਭ ਉਠਾਉਣ ਲਈ ਹੈ. ਇਹ ਅਧਿਐਨ ਨੀਮੀਬ (R01EB024864) ਅਤੇ ਨੈਸ਼ਨਲ ਸਾਇੰਸ ਫਾਉਂਡੇਸ਼ਨ ਦੁਆਰਾ ਕੁਝ ਹੱਦ ਤਕ ਫੰਡ ਦਿੱਤਾ ਗਿਆ ਸੀ.
ਇਹ ਵਿਗਿਆਨ ਹਾਈਲਾਈਟ ਇੱਕ ਮੁੱ ਖੋਜ ਲੱਭਣ ਦੀ ਖੋਜ ਬਾਰੇ ਦੱਸਦਾ ਹੈ. ਮੁ recation ਲੀ ਖੋਜ ਮਨੁੱਖੀ ਵਿਵਹਾਰ ਅਤੇ ਜੀਵ-ਵਿਗਿਆਨ ਬਾਰੇ ਸਾਡੀ ਸਮਝ ਵਧਾਉਂਦੀ ਹੈ, ਜੋ ਕਿ ਬਿਮਾਰੀ ਨੂੰ ਰੋਕਣ, ਨਿਦਾਨ ਕਰਨ ਅਤੇ ਇਲਾਜ ਕਰਨ ਦੇ ਨਵੇਂ ਅਤੇ ਵਧੀਆ ਤਰੀਕਿਆਂ ਨੂੰ ਅੱਗੇ ਵਧਾਉਣ ਲਈ ਬੁਨਿਆਦ ਹੈ. ਵਿਗਿਆਨ ਇਕ ਅਵਿਸ਼ਵਾਸੀ ਅਤੇ ਇੰਕਰੀਮੈਟਲ ਪ੍ਰਕਿਰਿਆ ਹੈ – ਹਰ ਖੋਜ ਪਹਿਲਾਂ ਦੀਆਂ ਖੋਜਾਂ ‘ਤੇ ਅਕਸਰ ਅਚਾਨਕ ਤਰੀਕਿਆਂ ਨਾਲ ਹੁੰਦਾ ਹੈ. ਬੁਨਿਆਦੀ ਮੁ Web ਲੀ ਖੋਜ ਦੇ ਗਿਆਨ ਤੋਂ ਬਿਨਾਂ ਜ਼ਿਆਦਾਤਰ ਕਲੀਨਿਕਲ ਪੇਸ਼ਗੀ ਸੰਭਵ ਨਹੀਂ ਹੋਵੇਗੀ.
ਅਧਿਐਨ ਹਵਾਲਾ: ਐਲੇਨ ਕੁਨਟਜ਼ ਐਟ ਅਲ. ਵੀਵੋ ਵਿੱਚ ਖੁਦਮੁਦਾ ਡਾਕਟਰੀ ਸੂਈਏ ਸਟੀਰਿੰਗ. ਵਿਗਿਆਨ ਰੋਬੋਟਿਕਸ (2023). Doi / 10.1126 / SciRoboticS.ADF7614